2024年のアイデア対決・全国高等専門学校ロボットコンテスト(高専ロボコン)全国大会『ロボたちの帰還』は、近畿地区の代表として出場した大阪公大高専が2連覇を果たした。(記事→
https://www.cemedine.co.jp/cemedine_reports/kousenrobocon2024-zenkoku1.html)
この大阪公大高専と地区大会でしのぎを削り、地区優勝を果たしていたのが、奈良高専「射駒」。全国大会ではメカトラブルによって敗退することになったが、あっという間に試合を終わらせてしまう力は全国でも屈指のものだった。近年続けて圧倒的な強さを見せるロボットが送り出される奈良高専を取材した。
高専ロボコン「完全制覇」が掲げられた部室
奈良高専といえば、近年の高専ロボコンにおいて、毎年のように優勝候補として挙げられる有力チームだ。2015年の『輪華繚乱』で初優勝を飾った後は、毎年のように近畿地区大会でも上位に食い込んでおり、地区をリードする存在として知られている。
そんな奈良高専「ロボコンプロジェクト」の活動場所となっている部室に入るとまず目を奪われるのが、「大和」「三笠」といった実績を残したロボットの名前を大書した筆文字。そして「全国制覇」「全国優勝」といった勝利を目指す力強い言葉が一面に掲げられた壁だ。
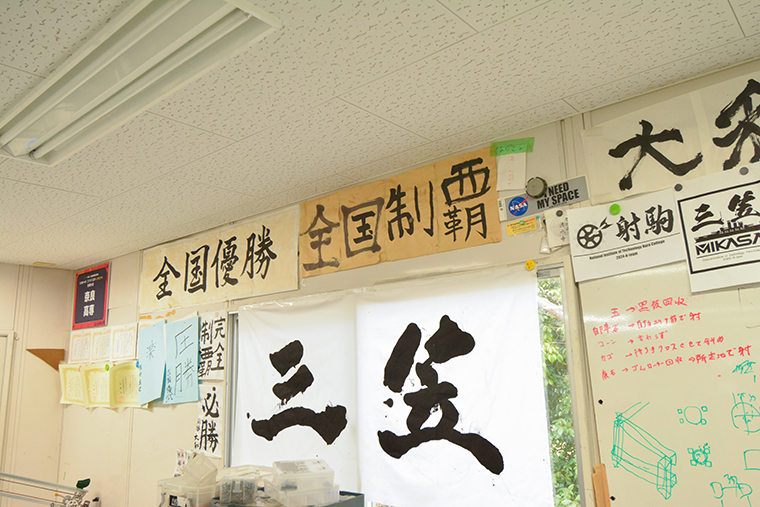
『輪花繚乱』の「大和」や、2022年『ミラクル☆フライ』優勝「三笠」の大きな筆文字の周囲に、全国制覇・全国優勝・完全制覇といった目標が掲げられている。日焼けした紙の色から、その目標がかなり古くからであることがうかがえるだろう。
優勝を目指すのは当然ともいえるが、壁には「完全制覇」「圧勝」といった文字も見えた。チームとして実績を残していながら「完全制覇」を目標にしているのは理由がある。今回、取材に対応してくれた「射駒」の回路担当、津田輝さんが教えてくれた。
津田輝さん(以下、津田さん)「じつは近畿地区って、地区大会で優勝したチームがそのまま全国優勝したことがないんです。僕たちも全国優勝したときは推薦での全国出場ですし、今年(2024)の大阪公大高専も推薦での出場です」
地区大会から負けない“完全優勝”という目標は、近畿地区を引っ張る奈良高専だからこそ、自分たちが最初に達成するんだという気持ちが込められていたのだ。
「合理的な判断」が貫かれた「射駒」の構成
奈良高専「射駒」は、“王将”“飛車”“桂馬”“香車”と名付けられた4機のロボットで構成されているチームだ。ご当地の生駒山や、そこに所縁を持つ巡洋戦艦「生駒」をヒントに、将棋の「駒」、大会テーマで求められる「発射」をかけているそうだ。
“王将”はエリアAにとどまって他のロボットを射出し、最後にオブジェクトを受け取る役目。“桂馬”が最初に100点を目指して飛び立ち、“飛車”がエリアCを縦横無尽に駆けまわり、オブジェクトを回収。“香車”がかけたエリアBをまたぐ橋を通って帰還する、という流れである。
エリアAからCへの往路では、必ずロボットが空中を飛ばなければならないとされていたため、各チームは着地時にロボットに伝わる衝撃をどうやって逃がすかに苦心していた。「射駒」も例外ではなく、特に“飛車”はオブジェクトを回収するために大型で重く作られていることもあって試行錯誤が繰り返され、完成は4機の中で最後になったという。
津田さん「当初はウレタン樹脂から全体を削り出したタイヤを使用していたんですが、どうしても重たかったんです。ロボット全体の軽量化も必要だったので、ホイール部分を3Dプリンタで製作して、周囲にゴムを貼る形にしました」
 津田輝さん
津田輝さん
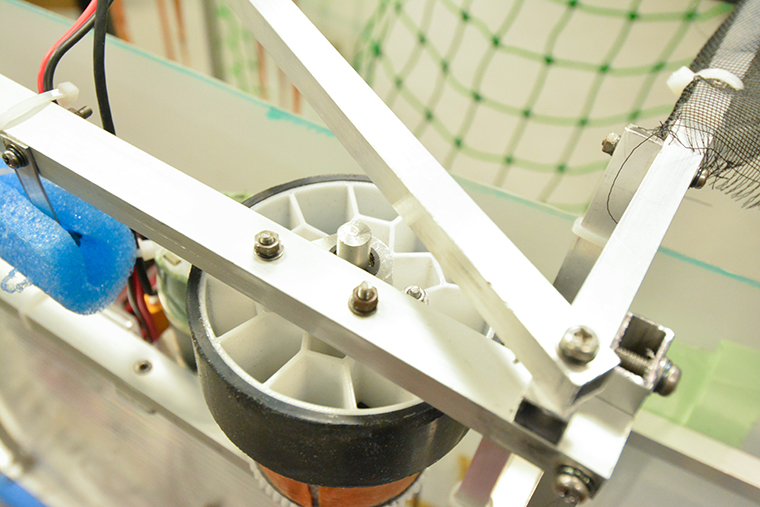 ゴム部分は非常に薄いが、ホイール自体の素材に弾力のあるTPU(熱可塑性ポリウレタン)を採用し、形状にも工夫を盛り込んだことで、着地の衝撃を変形して逃がすことができるようになったタイヤ。しかし、さすがに重たいロボットが数メートル飛ぶエネルギーをこれだけで逃がしきることは難しかった。
ゴム部分は非常に薄いが、ホイール自体の素材に弾力のあるTPU(熱可塑性ポリウレタン)を採用し、形状にも工夫を盛り込んだことで、着地の衝撃を変形して逃がすことができるようになったタイヤ。しかし、さすがに重たいロボットが数メートル飛ぶエネルギーをこれだけで逃がしきることは難しかった。
服部圭達さん(以下、服部さん)「吸収しきれない衝撃はフレーム自体に吸収させて、4輪が接地しないくらい歪みがひどくなったら交換することにしました。最初はサスペンションも試してみたんですが、あまりうまくいかなくて…。タイヤとフレームを合わせたらおおむね同じくらいの効果が得られたので、重さのことも考えてこの方式にしました」

歪んでもOK、という設計には驚いたが、話を聞いていくとそれが合理的な判断なのだと納得できるものだった。どうしてもルールで規定されたサイズ、重さといった制限はあるため、欲しい機構をすべて盛り込めるとは限らない。どうやって規定に収めていくかを考える中で、ロボットの故障や変形を防ぐサスペンションも、重量がかさむのであれば採用しない。その結果歪んでしまうフレームは消耗品と割り切り、必要に応じて交換する。その判断基準はあくまで「勝利」のためなのだ。この「勝利に向けての合理的な判断」がつらぬかれていることは、今回「射駒」の話を聞いて非常に印象的だった。
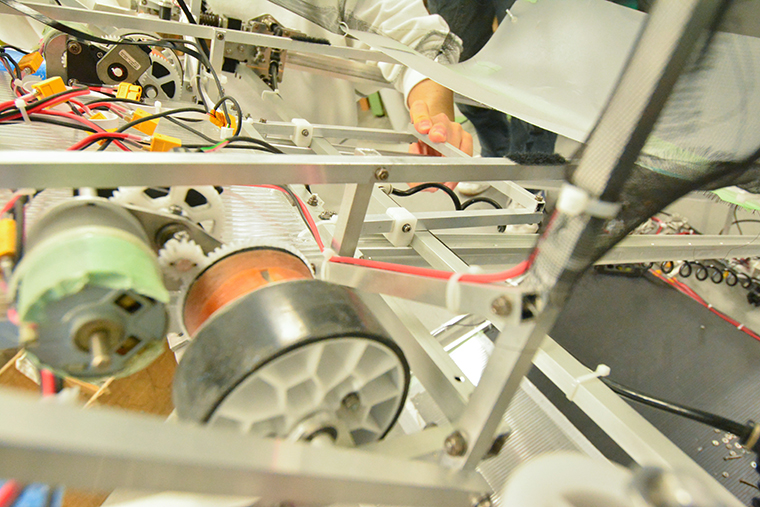
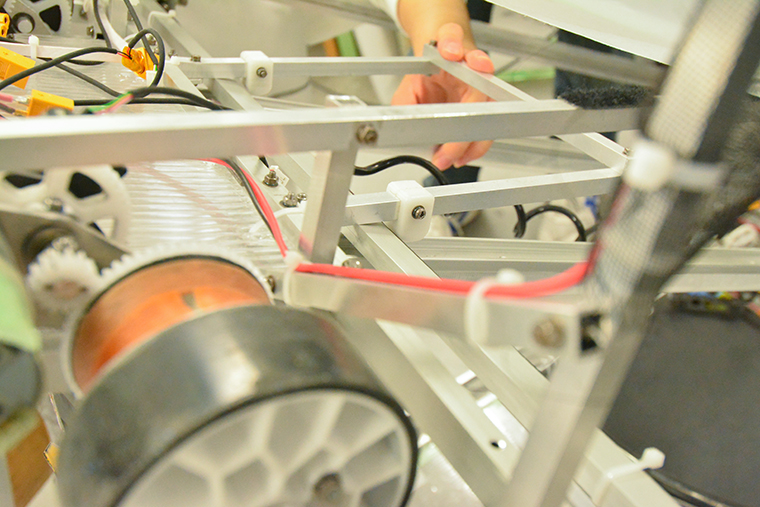
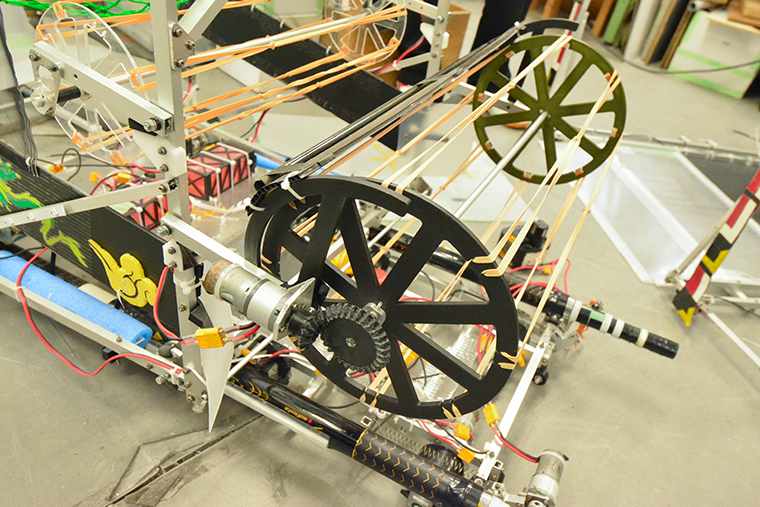 飛車のオブジェクト取り込み部分。回転し続ける黒いホイール同士を繋いだゴムバンドがオブジェクトに引っかかることで、非常にスムーズな回収を実現している。「どんな配置をされても取りやすさがあまり変わりません」(津田さん)
飛車のオブジェクト取り込み部分。回転し続ける黒いホイール同士を繋いだゴムバンドがオブジェクトに引っかかることで、非常にスムーズな回収を実現している。「どんな配置をされても取りやすさがあまり変わりません」(津田さん)
一直線に橋をかける“香車”
オブジェクトを回収した後、エリアCからAにロボットが戻る手段として橋をかけたチームは多い。「射駒」も橋をかけるロボット“香車”を使用したが、橋の素材として使用したグラスファイバー製の釣り竿の伸ばし方に特徴があった。圧縮空気を使って瞬時に伸ばすチームが目立つ中、「射駒」はローラーでじりじりと押し出す方式を採用したのだ。
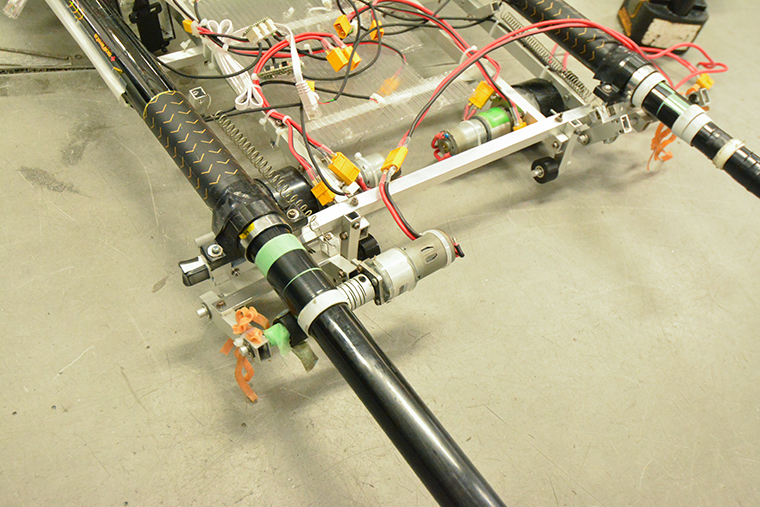
モーターに取り付けられたローターが引きばねの力で竿に押し付けられており、太さが変化する竿をスムーズにコントロールできるようになっている。
最速で勝利するためにスピードを追求するチームにしては、スピードに欠ける設計を選択するのは意外に思えるが、そこにはもちろん明確な理由がある。
服部さん「大きな圧縮空気のタンクは、乗り越えるために“飛車”が渡るときの傾斜がだいぶきつくなるんです。また、タンクそのものが金属で重いことに加えて電磁弁も必要になります。モーター2個で伸展するのに比べると重くなるので避けたかったんです」
最終的に“香車”の上を“飛車”が通ってエリアAに帰還するため、“香車”の高さはなるべく低く、傾斜は少ないほうがいい。高さは地区大会から全国大会に向けて半分ほどに低くしたくらい、重要なポイントだったという。そして万が一、橋をかけるのに失敗した際も、圧縮空気はリトライして手動で戻さなければならないが、モーターであれば試合を止めずに逆回転させて縮めることができる。そういったリスクマネジメントも含まれていたそうだ。
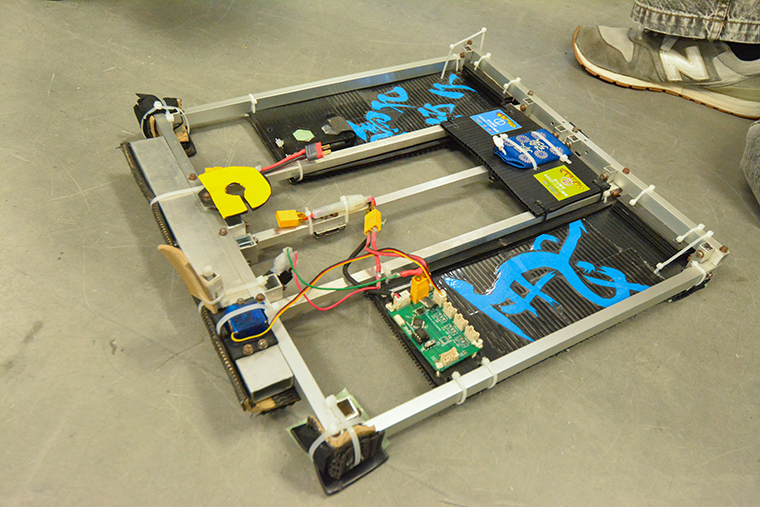
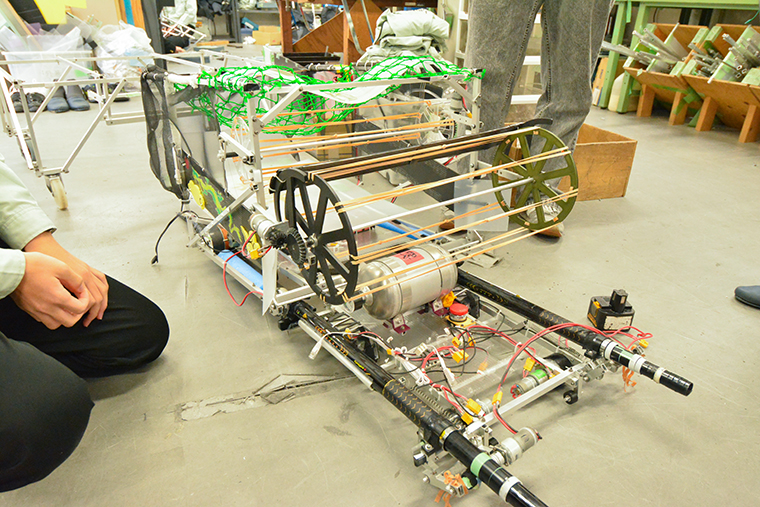 圧縮空気のタンクを載せてみると、使わないことで“香車”が圧倒的な低さを手に入れたことがよくわかる。
圧縮空気のタンクを載せてみると、使わないことで“香車”が圧倒的な低さを手に入れたことがよくわかる。
パワフルだからこそ安全・確実な装填ができる“王将”
“王将”が完成したのは地区大会1か月前の9月半ば。優勝を目指すチームの中には、早々にロボットを完成させて夏休み中はひたすら練習をするというところもあるという。意外に完成が遅かった理由は、“飛車”や“香車”を打ち出す射出装置に時間がかかったからだという。
服部さん「最初は射出装置を人力で引っ張っていましたが、モーターで引っ張るように改良して安全に保持できるようになるまで、とても時間がかかってしまったんです。モーターの力が足りなかったり、部品が壊れてしまったりと試行錯誤した結果、最初とはだいぶ違う構造になりました」
ばねに力を溜める方法として、「人力」で装置を引っ張るチームは少なくなかったが、大きく重いロボットを射出するエネルギーを「人力」で1日に何度も(練習や開発ならさらに何十回も!)溜めるなら、チームメンバーの腕力と体力はかなり消耗するだろう。服部さんは最終的にヘルニアを発症してしまったというのだから、冗談にならない話だ。
そこで「射駒」は、モーターでベルトを駆動し、定加重ばねを引っ張る方式を採用し、安全・スムーズにロボットを射出できるように様々な工夫を盛り込んだ。「射駒」で自慢したい機構として紹介してくれたのが、この射出機構周りの構造である。
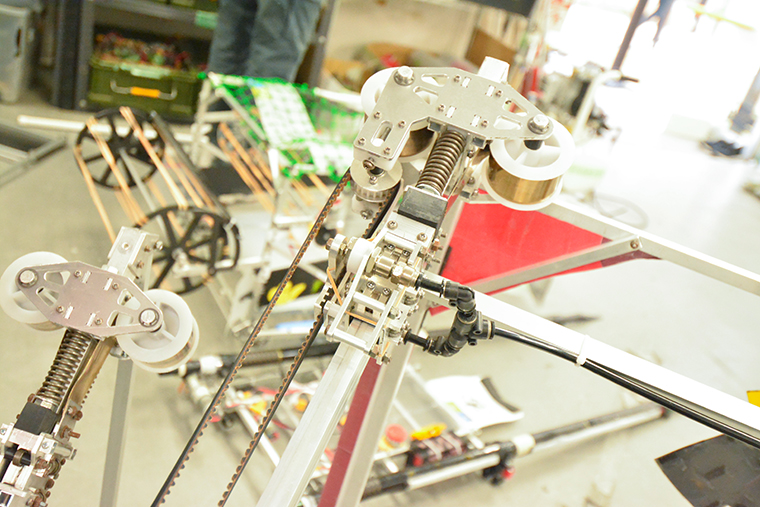 歯付きベルトと噛み合った状態
歯付きベルトと噛み合った状態
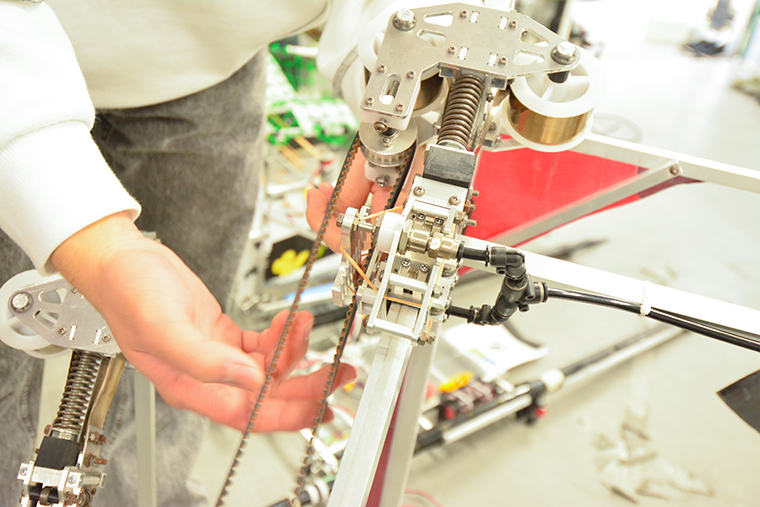 ベルトと射出ユニットが解放された状態。
ベルトと射出ユニットが解放された状態。
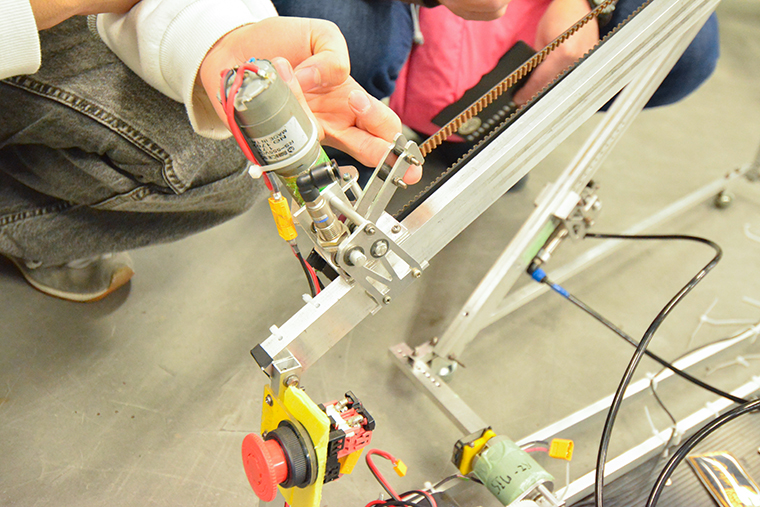 射出直前まで射出装置を保持するロック機構。
射出直前まで射出装置を保持するロック機構。
駒の名前どおり斜めに飛ぶ“桂馬”
エリアA、スタートゾーンに居続ける“王将”。各“駒”をエリアCに射出して最終的に“飛車”ごとオブジェクトを受け取る、まさに最も重要な“駒”といえる。
しかし、最大の特徴は試合開始直後、まったく移動せずに“桂馬”を飛ばすところだ。多くのチームがエリアAの中央近辺に移動してから最初のロボットを発射するのとは大きく異なるが、ここにも奈良高専チームのコンセプトが色濃く反映されている。
服部さん「1つめのロボットを射出し終えないと2つめを射出できないことと、1つ目のロボットしか100点を取りにいけないという、ルール上の制約が2つありました。“桂馬”をなるべく早く射出することと、100点を取るため正確に射出したいという目的を満たすためには、スタートゾーンから射出するのがベストという方針になったんです」
津田さん「“王将”はスタートゾーンで治具に合わせて置いていますので、それが一番正確なんですね」
移動してしまうと、フィールドの滑り具合や操縦のあやでどう停まるかわからないし、ズレていれば位置合わせに時間を取られる可能性もある。動かないほうが早くて正確なんです、という言葉には自信が満ちていた。
だが、「ロボたちの帰還」のフィールドは、赤チームと青チームでスタートゾーンから見た100点スポットの向きが反転してしまう。だからこそ、多くの他チームではエリアAの中央付近から射出するスタイルが多く見られたのだろう。しかし“王将”は“桂馬”の射出機構を左右どちらかに張り出して設置できるようになっており、試合前に組み替える形を採っていた。じつは過去の奈良高専「大和」も、射出装置をフィールドに合わせて付け替えるスタイルを採っていたが、現役生は特別それを参考にしたというつもりはなく、ひたすら「最速」「最強」を突き詰めていったら、自然とこの方式にたどり着いたのだという。
結果として、“王将”の横から射出された“桂馬”は、斜め前に飛ぶことになる。
将棋の駒としての桂馬は、最初の位置から2つ前に進んだうえで、右か左に1列ズレたマスに動く。確かに“桂馬”の動きは、唯一「跳ねる」と表現される駒の動きとそっくりだ。ロボット名の由来になったのも納得できる。

“王将”を左後ろから見た角度。2本の定加重ばねで“飛車”“香車”を飛ばすメインの射出装置と別に、左側へ1本の定加重ばねが組み込まれた“桂馬”専用射出装置が斜めに取り付けられているのが分かる。
 全国大会で“桂馬”が小型化(左)したのは、射出装置が追加された関係で機体サイズ内に収めるため。地区大会版(右)では空気抵抗を大きく受けて安定した飛び方と着地ができたのだが、小さくなった全国大会版は耐震ジェルを加えて着地を安定させたという。
全国大会で“桂馬”が小型化(左)したのは、射出装置が追加された関係で機体サイズ内に収めるため。地区大会版(右)では空気抵抗を大きく受けて安定した飛び方と着地ができたのだが、小さくなった全国大会版は耐震ジェルを加えて着地を安定させたという。
ただの板ではルール上で求められるロボットの定義を満たせないので、粘着性のある手先を持ったアームが組み込まれ、ボールを少し浮かせることができるようになっている。
基板から立ち上げるこだわりは悔しさから
ここ最近の高専ロボコンでは、海外製の軽量・小型のモーターを採り入れたロボットを見ることも少なくない。しかし「射駒」には1つも使われていなかった。その理由を津田さんは明快に答えてくれた。
津田さん「僕は絶対に使いません。以前購入して部活にも何個かありますが、あの製品はモーターとESC(コントローラー)をセットで使わないと動かないんです。でも、僕らは自分たちで基板を作っているので、よくわからない製品の通信仕様と戦わなきゃいけなくなるんですよね。基本的に他人が書いたプログラムを使うのは嫌なので、一切やめました。別のメンバーからは使いたいとも言われたんですけど、回路・制御班がNOを出した形ですね」
服部さん「DCモーターで出力は充分足りるんですよ。強いて言うなら、細いところや小さなスペースに小さなモーターが使えるというところはメリットですけど」
回路・制御のメンバーが自信を持っているのは、おおよそ5年に1回ほど更新されるという部活オリジナルで製作される制御基板の存在だ。ちょうど『ロボたちの帰還』で新型基板に切り替わったのだという。
津田さん「今回はロボットを射出装置に装填する際に電流制御を行っているんですが、同時に2個のモーターで同じ量を引かなければならなかったり、少しだけ戻すような動作をします。その時に大きな電流が流れたりすると、高専ロボコンの厳しい電流制限を一気に越えてヒューズが飛んでしまう可能性があるんですね。そこで回路に流れてる電流の現在値をセンサで読み取って、速度を自動で調節するような制御を今年からできるようになりました」
津田さん自身が2年前の大会当日、試合中にモータードライバーから煙が出て負けたときに、二度とこんな目に遭いたくないと思ったのがきっかけで作った新型基板は、今大会では1つも焼けていない。一般的にはベースとなる基板に縦に挿し込むスタイルが多い(奈良高専自体も、旧基板はそのスタイル)が、今回は立てた基板を左右から挟んで挿し込むスタイルに。その結果、着地や衝突の衝撃でも抜けなくなり、接触不良も起きにくくなったという副次的なメリットも得られたという。
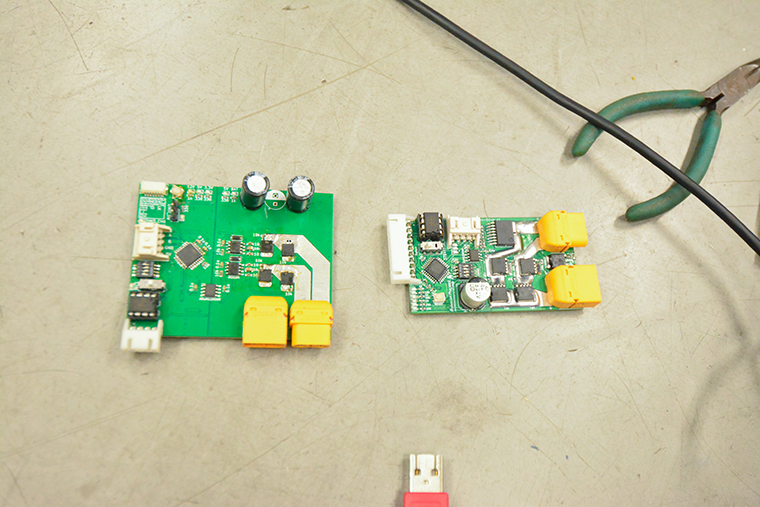 先代のモータードライバー基板(左)と、今年製作された新型(右)。使用の際に画面下がロボットの床方向になるので、縦に挿す先代と横向きに挿す新型の違いが分かる。新型は大電流に対応するため、表面にはんだを盛り増している。
先代のモータードライバー基板(左)と、今年製作された新型(右)。使用の際に画面下がロボットの床方向になるので、縦に挿す先代と横向きに挿す新型の違いが分かる。新型は大電流に対応するため、表面にはんだを盛り増している。
ミスが重なったことで暗転した全国大会
これらのロボットたちがそれぞれに実力を発揮し、地区大会で優勝。完全制覇のための道に進んだ奈良高専だったが、晴れの舞台で「射駒」は射出の失敗からロボットが破損してしまい、無念の敗退を喫してしまった。その時いったい何が起こっていたのか。
トラブルは“桂馬”を射出し、次に“飛車”を射出するときに起きた。
審判が“桂馬”の着地判定を完了する前に、メンバーが“飛車”を発射してしまったのだ。安全を確保するため、ルールでは前のロボットの着地が判定されてから審判が次の射出を許可するのだが、この指示を見逃してしまい、許可が出る前に発射してしまった。当然反則となるため“飛車”は「リトライ」で再発射することになる。ここで、もう1つのミスが出た。
津田さん「一度射出して着地すると、フレームが曲がってしまう部分があるんです。それをその場で修正してからリトライすべきだったのを忘れて、曲がったまま射出してしまったんです」
 射出される方向は画像左側。ばねで押し出されるアルミフレームに押される形で白い部品が引っ掛かる、本来の形。
射出される方向は画像左側。ばねで押し出されるアルミフレームに押される形で白い部品が引っ掛かる、本来の形。
 トラブルが起きたときの形。フレームが歪んでいたことで白い部品がばねの力を受け止めきれず、アルミフレームを乗り越えてしまっている。結果として、左に射出される際に白い部品が引っ掛かり、つんのめるようにして落下してしまった。
トラブルが起きたときの形。フレームが歪んでいたことで白い部品がばねの力を受け止めきれず、アルミフレームを乗り越えてしまっている。結果として、左に射出される際に白い部品が引っ掛かり、つんのめるようにして落下してしまった。
津田さん「設計や機構の問題と言うより、人為的ミスでした。まず最初に、試合の中で審判の指示を見ずに発射してしまったというところから始まって、ミスをしたことで焦りが生まれ、確認ミスも続けて起こしてしまったんです」
落下の衝撃を機体は受け止めきれず、部品はその場で修理が不可能な状態に。「二度と思い出したくない。たまに夢に出てくる」という津田さんのコメントは当然だろう。
全国最速のミッションコンプリート。最初からそれだけ。
記事冒頭でも触れたが、奈良高専「ロボコンプロジェクト」は、全国でも屈指の実績を誇るチームである。しかし学生チームのメンバーは毎年卒業し、新入生と入れ替わるのが常。何年も“強さ”をキープするのは難しい。
そんな中でも“強さ”を見せ続けている奈良高専は、顧問や技官といった学生を指導する立場の人が引っ張っているのかと考えそうになる。しかし津田さんは「うちは活動に先生がたが一切かかわって来ないので」と話してくれた。
もちろんプロジェクトリーダーの先生や指導教官の方はいらっしゃるが、こまめなアドバイスがあるわけではなく、あるていどロボットが出来上がってから「ちょっと、ここをこうしたら?」と助言をくれるような存在なのだそうだ。実際のところ取材でも、訪問時と退去時以外はロボコンプロジェクトのメンバーだけで対応していただいていたくらい。学生主体の活動なのである。
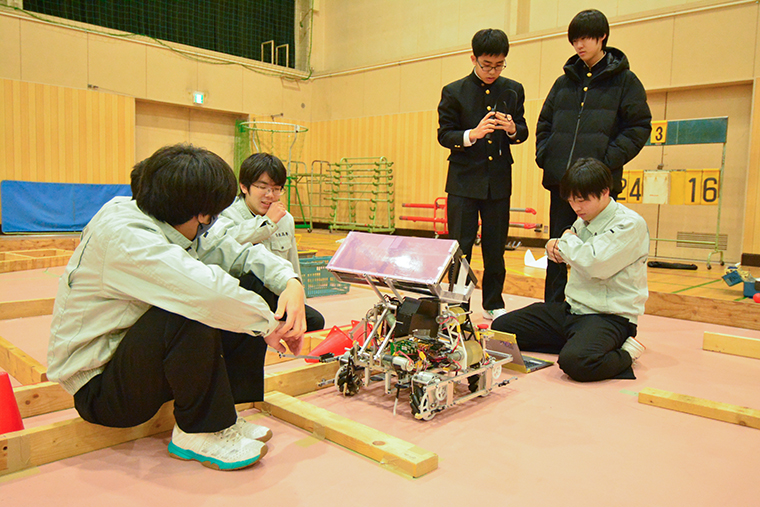 取材時にはミニロボコンへ参加する1年生が体育館で練習しているところを見せていただいたが、上級生は考えるヒントを与えるようなスタンスで応じていた。
取材時にはミニロボコンへ参加する1年生が体育館で練習しているところを見せていただいたが、上級生は考えるヒントを与えるようなスタンスで応じていた。
では、奈良高専はどうやって“強さ”を保っているのだろうか。
この日、取材で話している中で筆者が感じたのは、ロボコンプロジェクトに参加する学生の皆さんが持つ、勝利への強い気持ちだ。だから、「射駒」のどの部分の話を聞いても「こんな機構を使ってみたかった」というような、アイデアきっかけの答えは1つもない。ただひたすら「最速で勝つにはどんな機構が必要なのか」という目的に対して合理的な判断を繰り返した結果が「射駒」として形になっていたのだ。
この「勝利」を求める気持ちは活動のハードさにもつながっているのかもしれない。津田さんは「しんどい世界ですから」と笑っていたが、奈良高専からくり部に在籍する学生はおよそ50名くらいで、30名くらいが1年生だという。そこから2年生になるまでに1/3ほどに減ってしまうのが毎年のことなのだという。
津田さん「みんな夢と希望を持って奈良高専に入ってきて、『ロボコンやろう!』と来るんですけど、入ってみると何か違う。思ってたキラキラロボコンじゃない、となるんでしょうね。上級生は自分の作業に集中するから、結局自分で考えて、と下級生は放置されてしまいますし」
厳しいのは下級生だけではない。大会で燃え尽きて翌年は参加しないというメンバーもいる。服部さんはロボコンをやりたくて高専に入ったということもあって続けているが、疲れてやめてしまう気持ちも理解できるとは言う。
服部さん「自分は機構を作ってますが、先輩に直接教えてもらう機会がほぼなかったんです。基本、自分がいる代は見て学べでやられてたんで。技術的に何か継承したものはほぼないんですけど、何故か「絶対に負けたくない」っていう意思はありますね」
——津田さんもロボコン目指して入学ですか?
津田さん「いえ、違います」
じつは津田さん、今でこそロボコンにどっぷりだが、元々奈良高専にはEV(電気自動車)を研究したいというつもりで入学。最初はバドミントン部だったそうだ。ロボコンをテレビで見かけたことはあるが、入学した後も「あのヘルメット被ってる人何やろ」くらいにしか思っていなかったという。ちなみに元々運動部の津田さんからすると、ロボコンは「文化部ですけど運動部寄りの文化部」という感覚だそうだ。
確かにロボコンは、文化部の活動の中では勝負にかける気持ちが色濃く出る世界だ。さらに言えば、「完全優勝」「圧勝」を掲げる奈良高専は、輪をかけて濃い部活であることは間違いないだろう。ロボコンがやりたいかどうかではなく、「勝ちたい」という気持ちが強い学生さんが集まる場なのである。
筆者が過去に奈良高専で取材したときにも、当時のメンバーが「圧勝したい」と語ってくれていた。そのことを伝えると、津田さんはうなずいて
「例えば「大和」の時の勝ち方は“どこよりも早く投げて、相手に攻撃される前に、妨害すら考えずにやる”というものです。「三笠」も“どこよりも早くVゴール決めたら勝てる”という考え方。僕たちの「射駒」も、その辺の設計思想は一緒なんですよね。バーッと相手が何かする前に、先に終わらせてしまおうと」
最速でミッションコンプリートできるなら、相手がどこでも、どんなロボットでも関係ない。シンプルな考え方だ。直接伝えられていなくても、勝利を渇望してきた系譜が後輩を呼び寄せ、繋がっていくのかもしれない。「大和」から「射駒」に、約10年を超えて考え方が再臨した、左右を付け替える"桂馬"の射出装置にも、その繋がりは証明されているように思える。
津田さん「たぶん、何も受け継いでないから、僕たちはこうなってるんです」
何気ない一言だったが、津田さんのこの一言に奈良高専の“強さ”が受け継がれる最大の理由が込められていたように思えた。伝えられることではなく、自分たちの中に生まれる悔しさや勝利を求める気持ちがあるからこそ、大変な活動も耐えられるし、より高みを狙える。もちろん高専ロボコンに参加するチームは皆「勝ちたい」と考えているだろうが、奈良高専に満ちていたのは“飢え”にすら感じられる、勝利への渇望である。
津田さん「負けたくないんですよ。僕らは「ロボコン楽しい!」という“わいわいロボコンず”じゃなくて、“本気で勝ちに行くロボコンず”なんで」
高専ロボコン2025が間もなく始まる。新たな奈良高専のロボットがどんな形で最速・最強を実現しているのか、楽しみにしたい。
ライター:梓みきお











 ものづくり
ものづくり ものづくり
ものづくり ものづくり
ものづくり ものづくり
ものづくり ものづくり
ものづくり ものづくり
ものづくり ものづくり
ものづくり ものづくり
ものづくり ものづくり
ものづくり ものづくり
ものづくり